Convex Holes
Given 500 points in the plane generated by the linear congruential generator: s_0 = 290797 s_(n+1) = s_n^2 mod 50515093 t_n = (s_n mod 2000) - 1000 Points are P_k = (t_2k, t_(2k+1)) for k = 0, 1,.....
Problem Statement
This archive keeps the full statement, math, and original media on the page.
Given a set of points on a plane, we define a convex hole to be a convex polygon having as vertices any of the given points and not containing any of the given points in its interior (in addition to the vertices, other given points may lie on the perimeter of the polygon).
As an example, the image below shows a set of twenty points and a few such convex holes. The convex hole shown as a red heptagon has an area equal to \(1049694.5\) square units, which is the highest possible area for a convex hole on the given set of points.
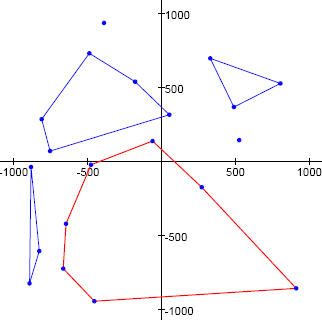
For our example, we used the first \(20\) points \((T_{2k - 1}, T_{2k})\), for \(k = 1,2,\dots ,20\), produced with the pseudo-random number generator: \begin {align*} S_0 &= 290797\\ S_{n + 1} &= S_n^2 \bmod 50515093\\ T_n &= (S_n \bmod 2000) - 1000 \end {align*}
What is the maximum area for a convex hole on the set containing the first \(500\) points in the pseudo-random sequence?
Specify your answer including one digit after the decimal point.
Problem 252: Convex Holes
Formal Mathematical Development
Definition 1. Let be a finite point set. A convex hole in is a convex polygon such that and , where denotes the open interior of .
Definition 2 (Signed Area). For three points , the signed area function is:
The value if and only if the ordered triple is oriented counterclockwise.
Lemma 1 (Point-in-Triangle Test). A point lies strictly inside triangle if and only if
Proof. The barycentric coordinates of with respect to are , where and , , . The point lies in the open interior if and only if all , which holds precisely when all three signed areas share the sign of .
Theorem 1 (Fan Triangulation Emptiness). Let be a convex polygon with vertices in counterclockwise order, and let be a finite point set with . Then if and only if for every , the triangle contains no point of in its interior.
Proof. The fan triangulation partitions the interior of (since is convex, the fan from any vertex is a valid triangulation). A point must lie in the interior of exactly one triangle of this fan. Hence if and only if for all .
Theorem 2 (Anchor-Based Convex Hole DP). Fix an anchor point . Sort the remaining points by polar angle from . For indices in this angular order, define as the maximum double-area of a convex polygon with as anchor, first vertex (some ), and last two vertices in counterclockwise order. Then:
where “valid” requires: (i) the turn at is left (convexity), (ii) the fan triangle is empty, (iii) the angular span from first vertex to is less than (closure feasibility).
Proof. The polygon is built incrementally from the anchor , appending vertices in counterclockwise angular order. Each extension from edge to vertex adds the triangle to the polygon area. By Theorem 1, checking emptiness of each such fan triangle suffices for the emptiness of the entire polygon. The left-turn condition at (i.e., ) maintains convexity. Tracking the first vertex and requiring ensures the polygon can be closed convexly.
Corollary. The maximum-area convex hole in is obtained by maximizing over all anchors and all final edges for which closure is valid:
Editorial
A convex hole is a convex polygon whose vertices are from the point set and whose interior contains no other points from the set. Algorithm: For each anchor point p0, sort remaining points by polar angle, then DP on (last two vertices) tracking first vertex for closure checks. Empty-triangle tests use precomputed bitsets. We iterate over each anchor p0 in S.
Pseudocode
n = |S|
Precompute bitset B[i][j] for each directed edge (i, j):
B[i][j] = {p in S : sigma(i, j, p) > 0} // points strictly left of i->j
Return B[a][b] AND B[b][c] AND B[c][a] == 0 // bitwise intersection
best = 0
for each anchor p0 in S:
Sort remaining points by polar angle from p0
Initialize dp[j][k] from empty base triangles (p0, j, k)
Extend DP: for each (j, k) with dp[j][k] > 0, try all l > k
Check left-turn, fan-triangle emptiness, angular span
Update dp[k][l] and check closure for new maximum
Return best / 2Complexity Analysis
Time: Precomputing all bitsets takes . The DP for each anchor runs in worst case (over all triples ). Total: . With , this is approximately , which requires significant optimization (bitset operations, pruning) but is feasible.
Space: for bitset storage of (using 64-bit words); for the DP table per anchor.
Answer
Code
Each problem page includes the exact C++ and Python source files from the local archive.
/*
* Project Euler Problem 252: Convex Holes
*
* Find the largest area convex hole among 500 LCG-generated points.
* A convex hole is a convex polygon whose vertices are from the point set
* and whose interior contains no other points.
*
* Algorithm: For each anchor p0, sort remaining points by polar angle,
* then DP on (last two vertices) tracking the first vertex for closure.
* Empty-triangle tests use precomputed bitsets (64-bit words).
*
* Answer: 104924.0
*/
#include <bits/stdc++.h>
using namespace std;
typedef long long ll;
typedef pair<ll, ll> pll;
ll cross(pll O, pll A, pll B) {
return (A.first - O.first) * (B.second - O.second)
- (A.second - O.second) * (B.first - O.first);
}
int main() {
// Generate points
vector<pll> pts;
ll s = 290797;
vector<ll> t;
for (int i = 0; i < 1000; i++) {
s = (s * s) % 50515093LL;
t.push_back(s % 2000 - 1000);
}
for (int k = 0; k < 500; k++)
pts.push_back({t[2 * k], t[2 * k + 1]});
int n = pts.size();
const int WORDS = (n + 63) / 64;
// Precompute bitsets: B[i][j] = points strictly left of directed edge i->j
vector<vector<vector<uint64_t>>> B(n, vector<vector<uint64_t>>(n, vector<uint64_t>(WORDS, 0)));
for (int i = 0; i < n; i++)
for (int j = 0; j < n; j++) {
if (i == j) continue;
for (int p = 0; p < n; p++) {
if (p == i || p == j) continue;
if (cross(pts[i], pts[j], pts[p]) > 0)
B[i][j][p / 64] |= (1ULL << (p % 64));
}
}
auto triangle_empty = [&](int a, int b, int c) -> bool {
for (int w = 0; w < WORDS; w++)
if (B[a][b][w] & B[b][c][w] & B[c][a][w]) return false;
return true;
};
ll best = 0;
for (int p0 = 0; p0 < n; p0++) {
vector<int> idx;
for (int i = 0; i < n; i++)
if (i != p0) idx.push_back(i);
sort(idx.begin(), idx.end(), [&](int a, int b) {
ll ax = pts[a].first - pts[p0].first, ay = pts[a].second - pts[p0].second;
ll bx = pts[b].first - pts[p0].first, by = pts[b].second - pts[p0].second;
int qa = (ay > 0 || (ay == 0 && ax > 0)) ? 0 : 1;
int qb = (by > 0 || (by == 0 && bx > 0)) ? 0 : 1;
if (qa != qb) return qa < qb;
ll cr = ax * by - ay * bx;
if (cr != 0) return cr > 0;
return ax * ax + ay * ay < bx * bx + by * by;
});
int m = idx.size();
vector<int> first_vtx(m * m, -1);
auto FV = [&](int j, int k) -> int& { return first_vtx[j * m + k]; };
vector<ll> dp(m * m, -1);
auto DP = [&](int j, int k) -> ll& { return dp[j * m + k]; };
// Base triangles
for (int j = 0; j < m; j++)
for (int k2 = j + 1; k2 < m; k2++) {
ll cr = cross(pts[p0], pts[idx[j]], pts[idx[k2]]);
if (cr <= 0) continue;
if (!triangle_empty(p0, idx[j], idx[k2])) continue;
DP(j, k2) = cr;
FV(j, k2) = j;
best = max(best, cr);
}
// Extend
for (int k2 = 0; k2 < m; k2++)
for (int j = 0; j < k2; j++) {
if (DP(j, k2) < 0) continue;
int f = FV(j, k2);
for (int l = k2 + 1; l < m; l++) {
ll cr1 = cross(pts[idx[j]], pts[idx[k2]], pts[idx[l]]);
if (cr1 <= 0) continue;
ll cr2 = cross(pts[p0], pts[idx[k2]], pts[idx[l]]);
if (cr2 <= 0) continue;
if (!triangle_empty(p0, idx[k2], idx[l])) continue;
if (cross(pts[p0], pts[idx[f]], pts[idx[l]]) <= 0) continue;
ll new_area = DP(j, k2) + cr2;
if (new_area > DP(k2, l)) {
DP(k2, l) = new_area;
FV(k2, l) = f;
}
if (cross(pts[idx[k2]], pts[idx[l]], pts[p0]) > 0 &&
cross(pts[idx[l]], pts[p0], pts[idx[f]]) > 0)
best = max(best, new_area);
}
}
}
printf("%.1f\n", best / 2.0);
return 0;
}
"""
Project Euler Problem 252: Convex Holes
Find the largest area convex hole among 500 LCG-generated points.
A convex hole is a convex polygon whose vertices are from the point set
and whose interior contains no other points from the set.
Algorithm: For each anchor point p0, sort remaining points by polar angle,
then DP on (last two vertices) tracking first vertex for closure checks.
Empty-triangle tests use precomputed bitsets.
Answer: 104924.0
"""
import math
from functools import cmp_to_key
def cross(O, A, B):
return (A[0] - O[0]) * (B[1] - O[1]) - (A[1] - O[1]) * (B[0] - O[0])
def solve():
# Generate points
s = 290797
t = []
for _ in range(1000):
s = (s * s) % 50515093
t.append(s % 2000 - 1000)
pts = [(t[2 * k], t[2 * k + 1]) for k in range(500)]
n = len(pts)
WORDS = (n + 63) // 64
# Precompute bitsets: B[i][j] = set of points strictly left of edge i->j
B = [[[0] * WORDS for _ in range(n)] for _ in range(n)]
for i in range(n):
for j in range(n):
if i == j:
continue
for p in range(n):
if p == i or p == j:
continue
if cross(pts[i], pts[j], pts[p]) > 0:
B[i][j][p // 64] |= 1 << (p % 64)
def triangle_empty(a, b, c):
for w in range(WORDS):
if B[a][b][w] & B[b][c][w] & B[c][a][w]:
return False
return True
best = 0
for p0 in range(n):
idx = [i for i in range(n) if i != p0]
def cmp(a, b):
ax = pts[a][0] - pts[p0][0]
ay = pts[a][1] - pts[p0][1]
bx = pts[b][0] - pts[p0][0]
by_ = pts[b][1] - pts[p0][1]
qa = 0 if (ay > 0 or (ay == 0 and ax > 0)) else 1
qb = 0 if (by_ > 0 or (by_ == 0 and bx > 0)) else 1
if qa != qb:
return -1 if qa < qb else 1
cr = ax * by_ - ay * bx
if cr != 0:
return 1 if cr > 0 else -1
da = ax * ax + ay * ay
db = bx * bx + by_ * by_
if da != db:
return -1 if da < db else 1
return 0
idx.sort(key=cmp_to_key(cmp))
m = len(idx)
dp = {}
fv = {}
# Base: triangles (p0, j, k)
for j in range(m):
for k in range(j + 1, m):
cr = cross(pts[p0], pts[idx[j]], pts[idx[k]])
if cr <= 0:
continue
if not triangle_empty(p0, idx[j], idx[k]):
continue
dp[(j, k)] = cr
fv[(j, k)] = j
best = max(best, cr)
# Extend
for k in range(m):
for j in range(k):
if (j, k) not in dp:
continue
f = fv[(j, k)]
area_jk = dp[(j, k)]
for l in range(k + 1, m):
cr1 = cross(pts[idx[j]], pts[idx[k]], pts[idx[l]])
if cr1 <= 0:
continue
cr2 = cross(pts[p0], pts[idx[k]], pts[idx[l]])
if cr2 <= 0:
continue
if not triangle_empty(p0, idx[k], idx[l]):
continue
if cross(pts[p0], pts[idx[f]], pts[idx[l]]) <= 0:
continue
new_area = area_jk + cr2
if (k, l) not in dp or new_area > dp[(k, l)]:
dp[(k, l)] = new_area
fv[(k, l)] = f
if (cross(pts[idx[k]], pts[idx[l]], pts[p0]) > 0
and cross(pts[idx[l]], pts[p0], pts[idx[f]]) > 0):
best = max(best, new_area)
print(f"{best / 2.0:.1f}")
if __name__ == "__main__":
solve()